Text is not enough
Hardware behavior depends on structure, state, constraints, and physical context — not only descriptions.
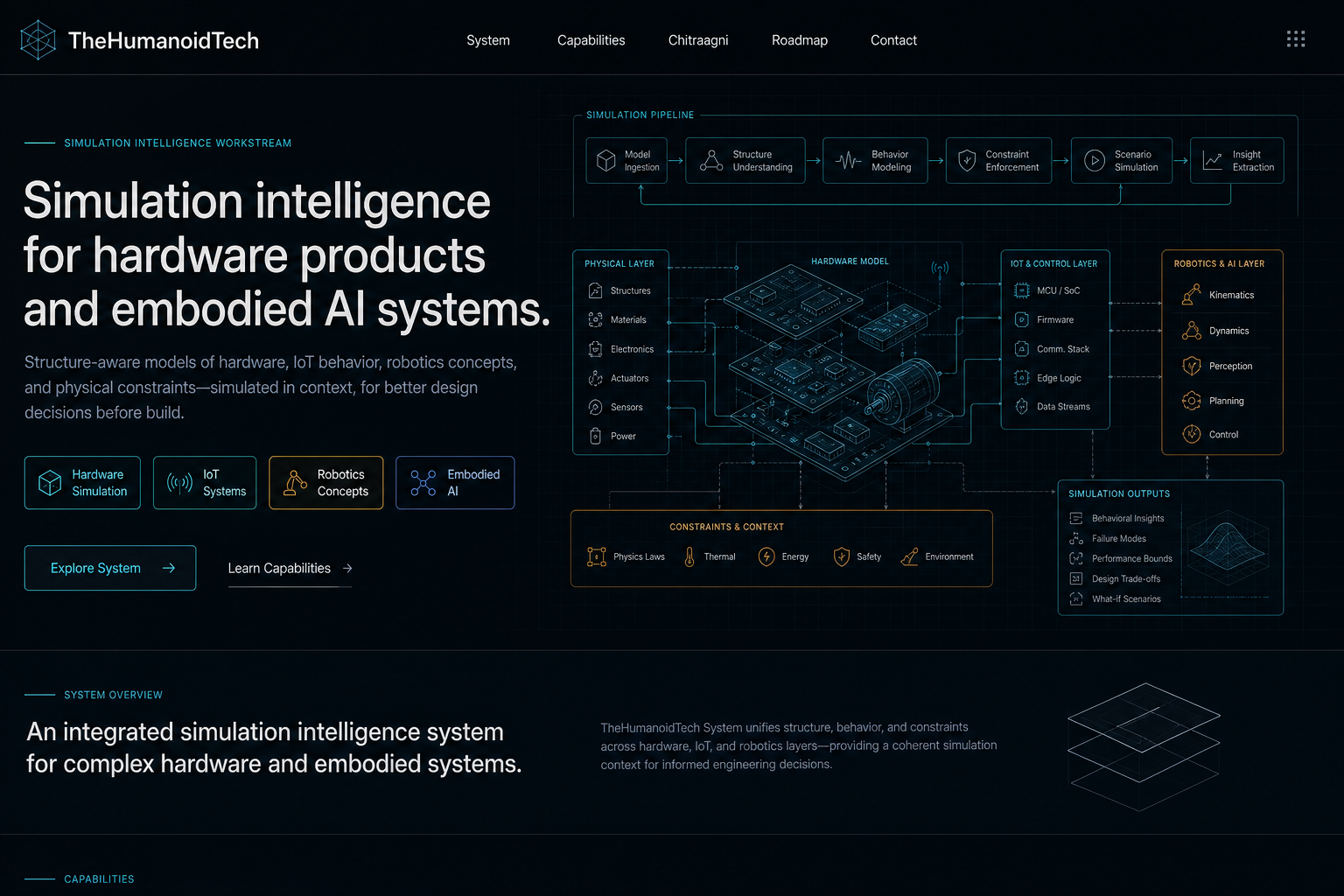
Physical-world intelligence for AI-native hardware
TheHumanoidTech builds the physical-world intelligence layer for AI-native hardware products — connecting hardware structure, IoT behavior, robotics concepts, physics constraints, and simulation context into systems AI can reason about.
Early-stage Amretra Dynamics workstream · Linux-hosted · Simulation-first hardware reasoning
Why this exists
Most AI software is built around text, screens, and documents. Hardware products are different: they have components, states, constraints, timing, sensors, actuators, environments, and failure modes. TheHumanoidTech focuses on representing those physical-world details clearly enough for AI systems to reason about them before a product reaches real hardware.
Hardware behavior depends on structure, state, constraints, and physical context — not only descriptions.
Product teams need ways to model behavior before spending time and money on physical prototypes.
The system should translate hardware concepts into structured context that AI workflows can inspect, explain, and use.
Represent product systems as components, sensors, actuators, device states, constraints, and relationships.
Map how a product may behave across scenarios, operating conditions, and state transitions before real-world buildout.
Reason about telemetry, control logic, sensor inputs, actuator outputs, and device-level decision paths.
Prepare simulation structures for robotics, humanoid tasks, skill concepts, and embodied system behavior.
Turn hardware models and simulation scenarios into structured context that AI systems can use for explanation, planning, and workflow generation.
Package simulation intelligence into visual handoff payloads that can later flow into Chitraagni’s product workspace.
Architecture flow
What the product is supposed to do.
The physical parts and their relationships.
The changing conditions of the system over time.
Limits from physics, environment, timing, power, and safety.
A structured situation to reason through before buildout.
A machine-readable representation for AI workflows.
A future payload for visualizing and deciding inside Chitraagni.
Future boundary
Chitraagni will own the UX, visual workspace, and product decision layer. TheHumanoidTech will provide the structured hardware and simulation intelligence that Chitraagni can visualize, explain, and turn into product workflows.
This integration is planned as a future boundary. The current site is the domain and product foundation, not the full integration.
Contact
TheHumanoidTech is an Amretra Dynamics workstream focused on simulation intelligence for AI-native hardware products. For serious product, research, or engineering conversations, reach out.